
Arduino開發板可以幫我們製作出許多過去看似複雜的機器或是作品
這裡我們將使用市面上很常見的Arduino遙控車進行重新設計,在教室或房間不時會有些雜亂的紙團或是垃圾掉在地板上的地方,動手來做一台遙控掃地機器人,透過手機遙控進行競賽看誰能最快能讓房間變得乾淨,快動手來做一台吧!
需要材料:
Arduino Uno 控制板*1
L298N 馬達驅動板*1
Arduino Sensor Shield V5.0 感測器擴展板*1
馬達*4
藍芽接收器*1
輪子*2
銅製萬象輪*1
300*300*5mm的壓克力板或是密集板*2
6號電池*2
電池盒*2
三軸邊刷*2
製作開始囉:
- 先進行車體外觀的設計,可繪製紙模使用線鋸機切割或是在電腦上設計然後用雷射切割的方式進行製作。建議車體使用較輕的材料,如密集板或是壓克力皆可,然後將車體重心置於後方,讓前方邊刷的部分懸空。


- 連接Arduino控制板與Arduino Sensor Shield V5.0 感測器擴展板。注意不要折到接腳。

- 連接藍芽接收器HC-05至擴展版上(可依照自己程式編輯內容選擇藍芽接收器)
藍芽接收器上TXD接擴展版RXD、接收器上RXD接擴展板TXD腳位。VCC則接到V腳位、GND接到G腳位。



- 為了同時提供Arduino板與L298N馬達驅動板電源,請將電線接至2.1mm電源插頭並焊接上。
注意電源插頭的接法是「內正外負」,因此內部接紅色電線,外部接黑色或藍色。

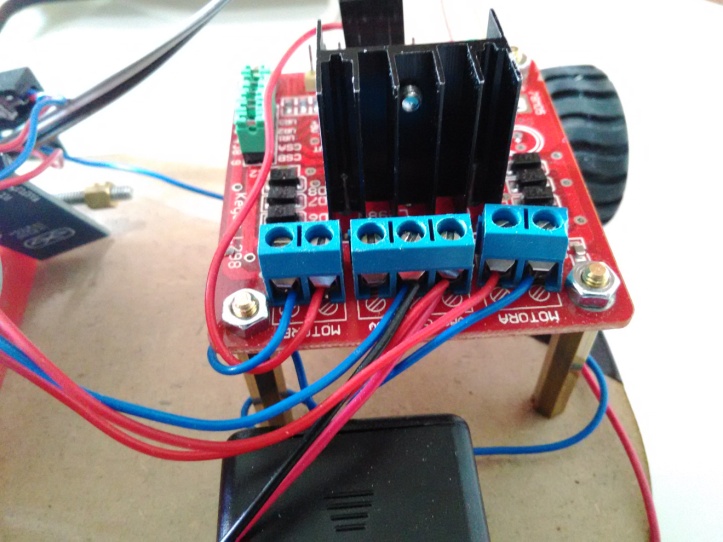
- 將電源連接上馬達驅動板,在電源接點上會有5V、GND和VMS三個接點,由於本機器需要供電量9V,因此須將地線接到GND、火線接到VMS接點上。
之後將馬達上的電線接至左右Motor的接點,如果正負錯誤可在程式中修正。
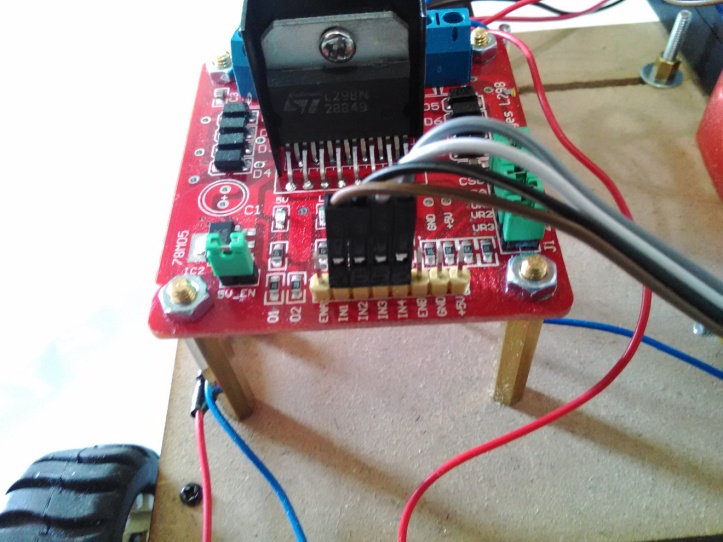
- 將杜邦接頭接上馬達驅動板上IN1~IN4的接腳,另一頭連接於擴充板上6、8、9、10四個接腳。
- 將零件與Arduino板以及馬達驅動板鎖在車體上,這裡有一些孔位我當初沒設計好,可使用小型手持鑽頭將所需要的孔位鑽出。

- 安裝萬向輪,在下方先墊上幾片墊片,後續可透過槓桿的方式調整車體容許的掃除物件大小。
注意要盡量將輪子鎖至車體中間,以免車體行徑間歪斜。


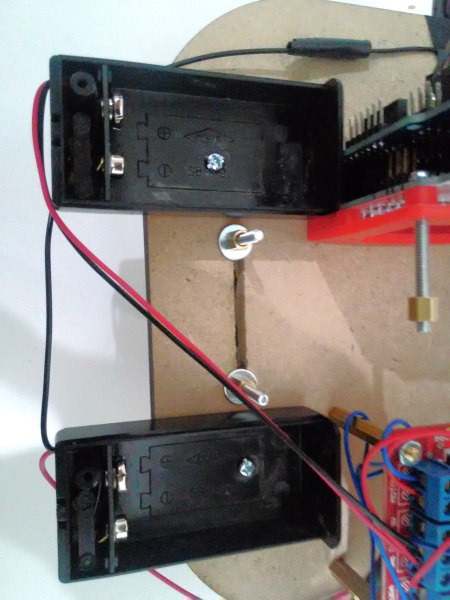
- 由於電池盒上並無相關孔位,因此須以手持電鑽將相關孔位鑽出。
注意左右需對稱,同樣是防止車體操作時發生歪斜的狀況。
其中一個電池座用於Arduino板與馬達驅動板之供電,另一個將作為前方邊刷之供電。
- 將馬達安裝置前方孔位,並使用銅柱將馬達牢牢鎖在車體上


- 將馬達齒輪用三秒膠黏上邊刷,需靜待約10分鐘,讓3秒膠凝固

- 將邊刷電線焊接至馬達上,可將焊接的位置以電器膠保護
- 使用銅柱鎖住車體與支撐桿件,並在雜物盒上以另一支撐桿進行支撐,如此則可調整雜物盒距離地面之位置。後續可依據車體離地高度進行調整。



- 然後將程式輸入進Arduino板,在手機上裝上合適的程式後就可以開始玩囉。


可以跟你索取此掃地機器人的arduino 的程式嗎?可以寄mail給我嗎?有興趣想做一臺!謝謝!
讚讚
可以跟你索取此掃地機器人的的arduino程式嗎?想要做一台,謝謝🙏
讚讚
可以跟你索取此掃地機器人的arduino 的程式嗎?可以寄mail給我嗎?有興趣想做一臺!謝謝!
讚讚
可以跟你索取此掃地機器人的arduino程式嗎?我要做一台圓形掃地機器人,同意的話請寄到我的mail,謝謝!
讚讚
可以跟你索取此掃地機器人的arduino 的程式嗎?同意的話請寄到我的mail,謝謝!
讚讚
可以跟你索取此掃地機器人的arduino 的程式嗎?同意的話請寄到我的mail,謝謝!
讚讚
可以跟你索取此掃地機器人的arduino的程式嗎?因為也想自己做一台,可以的話請寄到我的mail,謝謝!
讚讚
可以跟你索取此掃地機器人的arduino的程式嗎?因為也想自己做一台,可以的話請寄到我的mail,謝謝!
讚讚
可以跟你索取此掃地機器人的arduino 的程式嗎?可以寄mail給我嗎?有興趣想做一臺!謝謝!
讚讚
可以跟你索取此掃地機器人的arduino的程式嗎?因為也想自己做一台,可以的話請寄到我的g-mail,謝謝!
讚讚
可以跟你索取此掃地機器人的arduino 的程式嗎?同意的話請寄到我的mail,謝謝!
讚讚
老師您好,方便跟您索取掃地機器人的arduino 的程式嗎?
讚讚
老師您好,方便跟您索取掃地機器人的arduino 的程式嗎?
讚讚
老師您好,方便跟您索取掃地機器人的arduino 的程式嗎?
讚讚
老師您好 方便跟您要arduino的程式還有底版的尺寸嗎?
讚讚